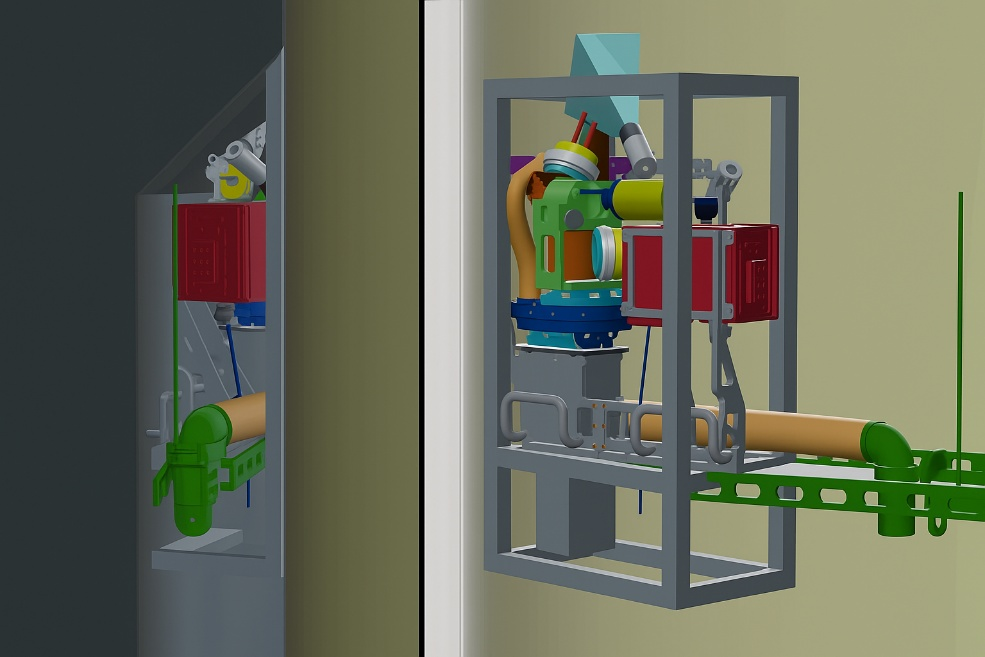
The aim of the project was to design and deliver a system for laser cleaning of a VVER-440 type 213 nuclear reactor. Cleaning the reactor vessel was necessary to enable regular ultrasonic inspections, which cannot be performed properly when contaminants are present on the vessel surface and prevent ultrasound from penetrating into the material.
The main technological challenge was the extremely limited working space. There is only a 30 cm gap between the reactor vessel and the concrete containment structure, requiring a compact and highly precise solution.
Scope of Implementation
- Design of a unique laser process head for operation in an extremely confined space.
- Integration of an extraction system for efficient removal of particles released during cleaning.
- Use of a custom-designed extraction duct manufactured using laser sintering.
- Protection of the laser optics against particle deposits.
- Development of a robust maintenance-free solution for operation during a limited nuclear block outage.
- Integration of sensors for remote diagnostics and system management.
- Integration of a vision system for real-time laser process control.
Benefits of the Solution
The implemented solution enabled non-contact and non-abrasive cleaning of the reactor vessel without the need for operator access. The system operated autonomously in demanding conditions and in complete darkness.
Thanks to its robust design, the system made it possible to clean the entire reactor vessel without any service intervention. This was crucial due to work safety requirements and the limited duration of the planned nuclear block outage, during which the entire technology had to be installed, the vessel cleaned, and the workplace restored to its original state.
Results
- Non-contact and non-abrasive cleaning of the reactor vessel.
- Fast installation, cleaning, and removal during the planned outage.
- Remote management, diagnostics, and laser process control.
- Faster and more efficient cleaning than conventional brushing methods.
- Autonomous operation without operator access